0577-62666010
0577-62666789



0577-62666010
0577-62666789
|
|
三科客服
0577-62666010
發布時間:2020-08-21
我們在研究了PLC控制器或運動控制器在微多軸同步運動的同時,也學會如何通過一個5階曲線將軸地運動的位置使之更平滑。

現在一般伺服運動中,如果是控制電機走固定位置的方式,上位控制系統PLC一般都是讓伺服走一個梯形的位置塊。這種模式都是單軸的運動模式,在這種情況下,每個軸的運動都是獨立的,而不是關聯的。在這類運動方式下,如果要將2個軸或者多個軸的運動建立聯系,只能通過上位PLC將2個軸或多個軸進行邏輯關聯。
例如在某個時間節點,PIC通過邏輯判斷要某2個軸一起運動,則發出一個觸發信號,觸發2個軸開始運行先前設定好的速度指令或者位置指令。但是在這個模式下,一旦PLC發出觸發指令后,2個軸就開始各自進行運動,在完成當前運動前,PLC是無法進行過程干預,或者2個軸之間是無法進行速度或者位置關聯的。所以,這類模式是無法保證過程中的2個軸的關聯性。
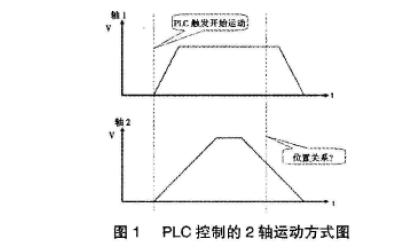
如果在運行的過程中,任意一個軸的速度有變化,或者位置有波動,其他軸是無法獲知這個情況,還是會根據之前的設定繼續完成該步驟。
上述可編程控制器與plc相關資料由三科變頻器收集整理。

 您當前的位置:
您當前的位置: